Подтверждаю, что я ознакомлен с пользовательским соглашением и правилами обработки персональных данных
Отправить
Характеристики
Монтаж
потолочный
Высота установки
От 2,4 до 7 метров
Точность
до 100%
Видеоаналитика
Маршруты посетителей, время пребывания, тепловые карты
Конверсия
Подсчет мимо проходящих
Питание
Встроенный PoE 48 V
Размеры
138х65х25мм
Описание
Принцип работы:
3D счетчик посетителей использует алгоритм стереовидения, позволяющий с большой точностью считать плотный поток посетителей.
DSP процессор, получает изображение с двух графических сенсоров, вычисляет объемную картину, преобразует ее в математическую 3D модель, находит головы проходящих посетителей и по встроенному алгоритму выделяет посетителей сопровождая их в пределах рабочей области исключая при этом ложные объекты, тени и блики. Все полученные данные о подсчете процессор счетчика сохраняет в своей памяти и в дальнейшем их передает в систему обработки данных.Подсчет проходящих под счетчиком людей происходит по определению головы каждого из проходящих, что позволяет точно вести подсчет с исключением из подсчета детей, теней, солнечных бликов, продуктовых тележек, детских колясок, сумок.
Краткое описание работы:
Изображение пространства, через два объектива проецируется на графические сенсоры CMOS, где происходит первичная оцифровка видимой части изображения и передача его по шине данных в DSP процессор. Получается так, что два сенсора передают одновременно одно и тоже изображения пространства, смещенное по базису в DSP процессор.
DSP процессор полученные изображения принимает, делает корректировку на цвет, яркость, шумы и буферизирует. Полученные два изображения процессор сравнивает и находит в них совпадающие части, на основании полученных данных о совпадающих частей, процессор вычисляет и воссоздает математическую модель 3D пространства. В дальнейшем процессор встроенным программным обеспечением вычисляет головы посетителей и считает сколько посетителей прошло через точку подсчета. Полученные данные о подсчете процессор сохраняет на FLASH память и в дальнейшем передает через сеть.
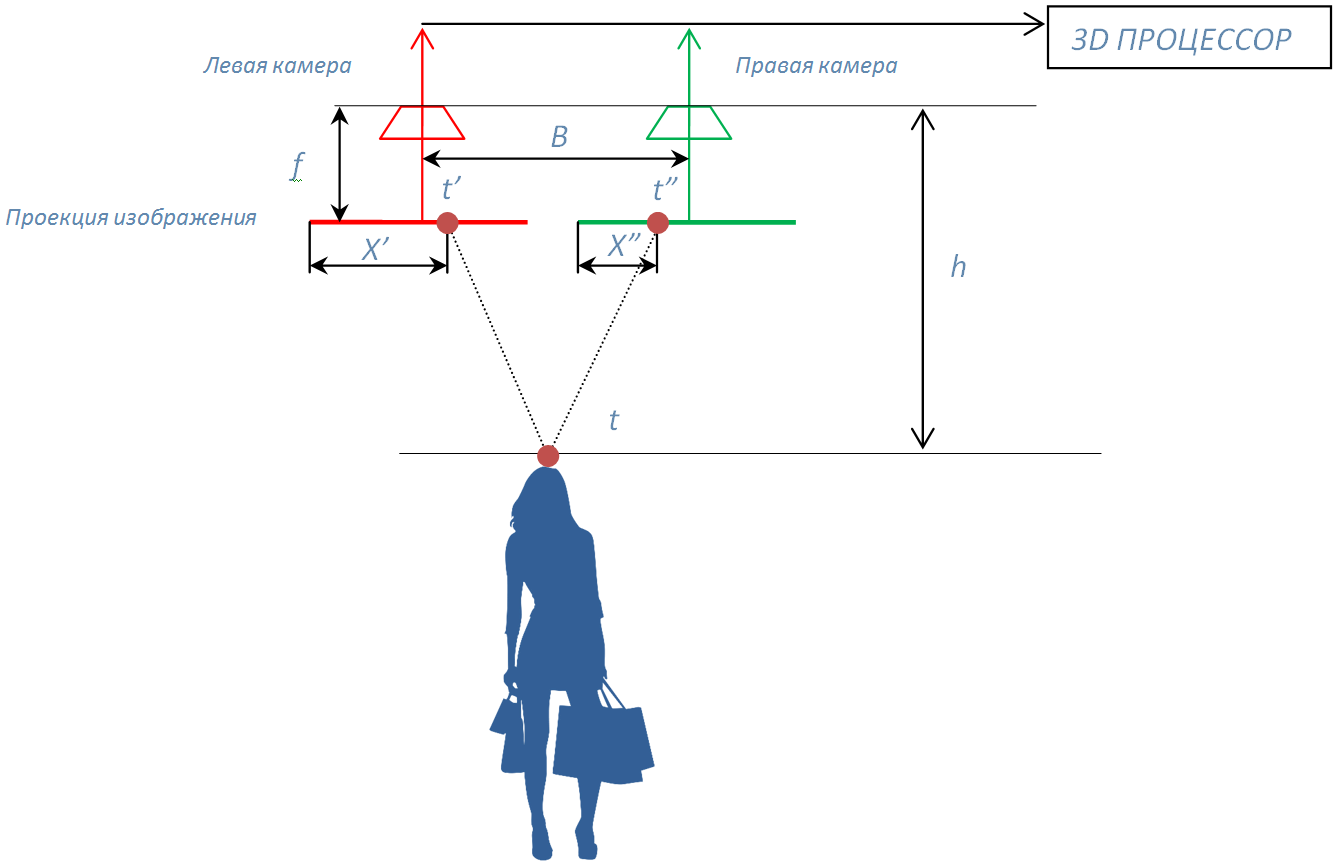
Математическое представление.
Процессор счетчика проверяет каждую точку видимого изображения с левой камеры и находит сопоставимую ей точку на правой камере.
t - видимая точка головы посетителя
t' - проекция точки t на левой камере
t'' - проекция точки t на правой камере
3D процессор DSP вычисляет взаимное смещение двух точек t' и t''
X' - смещение точки t' на проекции левой камеры
X'' – смещение точки t'' на проекции правой камеры
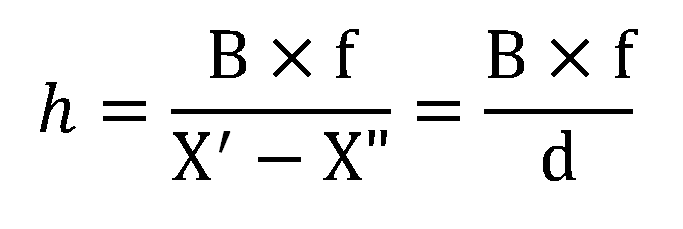
Формула рассчета удаление точки от посетителя до счетчика.
Где:
h - искомая величина, удаление точки от счетчика
B – базовая линия, расстояние между линзами счетчика, равняется 120мм
f – фокусное расстояние линз известная величина и равняется 2,5 mm
X' – координата точки на левой камере, вычисляется 3D процессором
X'' – координата точки на правой камере, вычисляется 3D процессором
d – диспаратность = X' - X'' - вычисляется процессором.
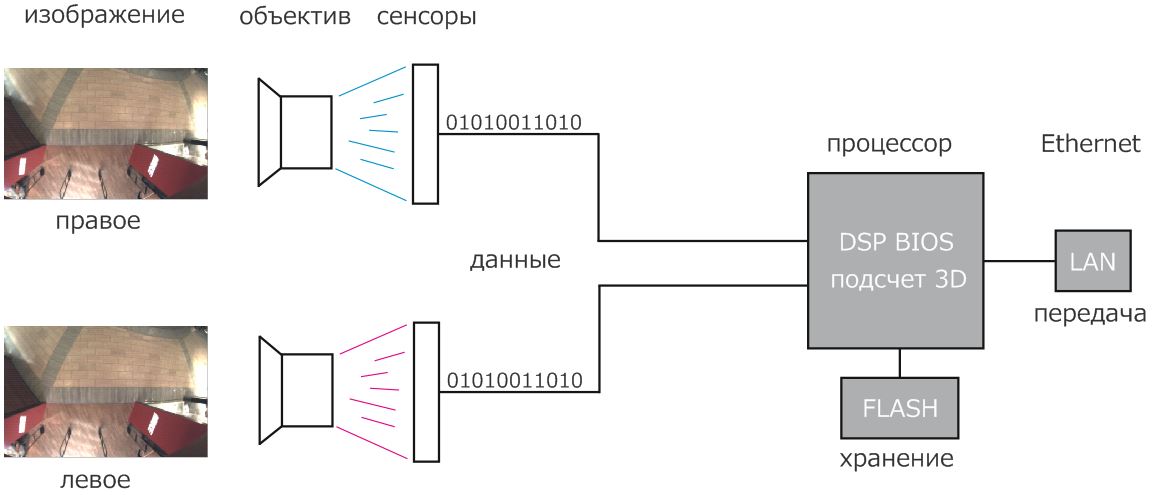
Схемотехника:
Изображение пространства, через два объектива проецируется на графические сенсоры CMOS, где происходит первичная оцифровка видимой части изображения и передача его по шине данных в DSP процессор. Получается так, что два сенсора передают одновременно одно и тоже изображения пространства, смещенное по базису в DSP процессор.
DSP процессор полученные изображения принимает, делает корректировку на цвет, яркость, шумы и буферизирует. Полученные два изображения процессор сравнивает и находит в них совпадающие части, на основании полученных данных о совпадающих частей, процессор вычисляет и воссоздает математическую модель 3D пространства. В дальнейшем процессор встроенным программным обеспечением вычисляет головы посетителей и считает сколько посетителей прошло через точку подсчета. Полученные данные о подсчете процессор сохраняет на FLASH память и в дальнейшем передает через сеть.
Визуализация алогоритма:
На видео представлен 3D видеопоток изображения человека, полное отсутствие теневых шумов, алгоритм распознает высоту каждой точки человека
Есть
вопросы?
Подтверждаю, что я ознакомлен с пользовательским соглашением и правилами обработки персональных данных